網頁最後修改時間:2017/10/02
 |
網頁最後修改時間:2022/03/17
|
兩輪小車的驅動與控制網路上應該有不少的資料可以參考 ? 既然如此,又寫一次有什麼不同之處 ?
WiFi 控制在網路上應該也有很多不少的資料可以參考 ? 既然如此,有什麼不同之處 ?
解釋如下:
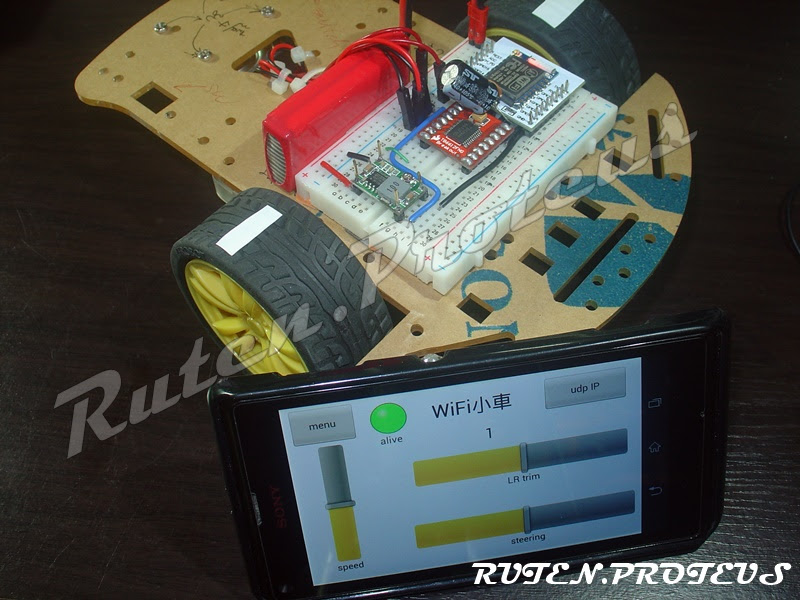
這一篇網頁基本上是 WiFi 小車說明的最後一篇。進入這一篇網頁之前,請先搞定小車組裝與電路佈線等工作,再準備一支 Android 手機,就可以開始了!
網頁最後修改時間:2022/03/17

|
兩輪小車的驅動與控制網路上應該有不少的資料可以參考 ? 既然如此,又寫一次有什麼不同之處 ?
WiFi 控制在網路上應該也有很多不少的資料可以參考 ? 既然如此,有什麼不同之處 ?
解釋如下:
這網頁是 ESP8266 WiFi 控制小車的電路佈線與馬達轉向測試的說明,初步確認佈線的電路與馬達轉向沒問題之後,再進入真正的 ESP8266 控制小車的程式碼撰寫。
網頁最後修改時間:2022/03/17

|
這個網頁是用來說明兩輪智能小車底盤與直流減速馬達的組裝建議,彌補賣場說明不足之處。
 |
